
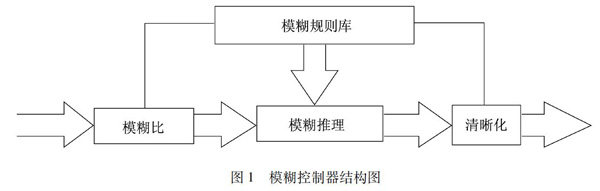
 总结为一个清晰量经过模糊推理得出另外一个输出清晰量.从数学角度来看,即输入量的模糊集合中的一个确定量进行模糊推理后得到从这样的结构特点来看,模糊控制系统可简化为一个精确量通过系统响应得出另外一个精确量.这样的简化使得在设计模糊控制器时,如何获取模糊规则库建立模糊推理变成如何准确地获取响应函数.而在这里所指得响应函数即为本文所讨论的模糊粒函数,下面将讨论模糊粒函数与模糊集合关系.
总结为一个清晰量经过模糊推理得出另外一个输出清晰量.从数学角度来看,即输入量的模糊集合中的一个确定量进行模糊推理后得到从这样的结构特点来看,模糊控制系统可简化为一个精确量通过系统响应得出另外一个精确量.这样的简化使得在设计模糊控制器时,如何获取模糊规则库建立模糊推理变成如何准确地获取响应函数.而在这里所指得响应函数即为本文所讨论的模糊粒函数,下面将讨论模糊粒函数与模糊集合关系.
在模糊控制系统中,输入集合和输出集合均为模糊集合,分别对输入量和输出量粒化,使模糊函数每个输入量都是一个模糊粒,这个模糊粒与输出量中的一个模糊粒存在着映射关系.设X及Y为模糊信息粒化后的语言变量,Ai及Bi(i=1,2,…,n)表示其模糊子集,对其模糊映射关系可用模糊规则表示:若X是Ai,则Y是Bi.以此可以得到模糊函数的表达公式:
通过图2的映射关系图,模糊控制器在原理上等效于一个粒函数器,这样从理论上便可以简化模糊控制器的结构,将通过模糊规则得出模糊函数的结构部分等效替代为粒函数响应器,这样实现模糊规则制定与推理实现分离,简化结构.通过上述分析,可以将模糊控制系统等效于一个由模糊粒函数作为响应函数的控制系统,等效图如图3所示.
对于一些难以建模、复杂度高的控制系统,很难用建立状态方程再解微分方程的方式求解出响应函数用于控制,依靠人类经验和专家知识建立模糊规则库是最好的解决方案,但有时影响因素过多,且每个因素要求的粒化程度较细,使模糊规则的个数急剧增长,就难免产生规则爆炸问题,通过模糊信息粒化模型求解出模糊控制器的粒响应函数用于控制,简化控制器的运算量,则可解决这一问题.
2 传统模糊控制器与粒函数控制器实验
2.1 传统模糊控制器实验
在工业生产中,维持供出水水箱液面恒定是一项重要技术指标,同时也是检验模糊控制器效果好坏的重要工业应用,水箱的出水量与供水量要保持恒定,即在水箱中,水箱的液面永远保持恒定.如何让液面保持恒定,这在精确数学上是不容易建立数学模型的,在实际的工业生产中,水箱液面恒定问题往往是根据人的经验所获得,这一特点就适用于模糊控制.因此液面恒定问题通过模糊控制方法可以得到很好的解决,这种方法也多用于现在无法采用精确数学建模的工业控制中.液面控制系统同时也可以检验一个模糊控制器的控制效果.
本实验利用单容水箱作为实验控制系统,单容水箱模糊控制器为二输入一输出的模糊控制器,两输入分别为实际水位与给定水位值的误差e和误差变化率ec,输出值为u.在实验中定义e的模糊子集为{negative,zero,positive},这里negative,zero,positive 分别表示偏低,正好,偏高.ec的模糊子集为{Negative,Zero,Positive},这里Negative,Zero,Positive分别表示偏慢,正好,偏快.u的模糊子集为{closefast,closeslow,nochange,openslow,openfast},这里closefast,closeslow,nochange,openslow,openfast分别表示快关,慢关,不变,慢开,快开.液面模糊控制表如表1所示.
在Matlab命令窗口中输入“Fuzzy”,进入FIS Editor,在FIS Editor中进行模糊隶属度函数编辑,在本次试验中,实际水位与给定水位误差e和误差变化率ec的模糊隶属度函数均采用高斯函数,ec和e的隶属度函数图如图4所示.
模糊控制器输出值u的隶属度函数图采用三角波形函数,u的隶属都函数图如图5所示.
传统模糊控制器的水箱系统仿真在Matlab的Simulink中提供,将之前设定的水箱模糊控制器植入系统中,可得仿真结果.水箱系统图如图6所示,仿真结果图如图7所示.
图7为模糊控制器控制下理想水位与实际水位的对比图,从图7中可以看出,当理想液位发生階跃变化时,实际水位在跟随着理想水位变化,并很快到达理想水位状.由于模糊控制器中的模糊推理方法基于启发性的知识及语言决策规则设计的,有利于模拟人工控制的过程和方法.在实际水位处于稳定状态时,没有波动,具有很好的实时性和稳定性.
2.2 粒函数控制器分析
在传统模糊控制器分析中,提到模糊控制规则是对专家的理论知识和实践经验的总结,对于粒函数来讲,需要将模糊信息粒化,将e和ec分别取9个模糊信息粒,通过Matlab中cftool拟合工具进行函数拟合,将拟合好的粒函数输入函数器中,函数器代替图6中Fuzzy Logic Controller模块.为了更好地进行实验数据对比,分别拟合3阶和5阶函数,进行实验结果比对.
3阶拟合函数数值表如表2所示.
3 实验结果分析
通过传统模糊控制器与粒函数控制器在同一水箱水位控制系统中所得的实验结果来看可得出以下结论:在某些无法用精确数学建立而可以用操作者经验控制的控制系统可以用模糊控制来实现.通过图7~9的对比来看,模糊粒函数由于在理论上是将每一条模糊规则看成一个粒点,通过对粒点的拟合得出模糊系统的系统响应函数,因此模糊粒函数在模糊控制系统中可完全代替模糊控制器.从实验结果上来看,控制效果并没有因为将模糊控制器换为精确函数器而下降,从而得出结论,模糊粒函数器与模糊控制器是等效的,并且模糊粒函数器从结构和控制规则上比模糊控制器要简易,从控制成本上比模糊控制器要低.因此通过这种方式可大大降低模糊控制系统的复杂程度.
由于模糊粒函数器中,是一条粒函数曲线,而不是模糊规则,因此在模糊控制系统中运用模糊粒函数代替模糊控制器可有效地解决由于模糊规则过多模糊控制器引起的规则爆炸问题,也给模糊规则爆炸问题提供了一种有效的解决手段.
4 结 论
本文作者给出了模糊粒函数与传统模糊控制器的等效替代关系,并且通过水箱水位控制系统的实验验证了两者在工业系统中的控制效果等效.由于模糊粒函数可以等效替代传统模糊控制器,因此可大大降低模糊控制系统的复杂程度,可很好地解决由于控制经验过多所带来的模糊规则爆炸问题.本文作者给出的是模糊粒函数应用于水箱液位恒定模糊控制系统中的控制效果,这种模糊粒函数方法可类似的应用于其他模糊控制领域,为复杂的模糊控制系统降低成本,为未来模糊控制领域发展提供了一个新的方向.
参考文献:
[1] Yin Y.The Essence of fuzzy control [J].Frontier Science,2015(01):16-27.
[2] Li H X,Song W Y.Timevarying system modeling method based on fuzzy inference [J].Journal of Systems Science and Mathematical Sciences,2009(08):1109-1128.
[3] Wang G Y,Zhang Q H.An overview of granular computing [J].CAAI Transactions on Intelligent Systems,2007(06):8-26.
[4] Gracek A.Granular modeling of signals:A framework of granular computing [J].Information Science,2013(02):1-11.
[5] Zadeh L A.Toward extended fuzzy logic—A first step [J].Fuzzy Sets and Systems,2009,160(21):3175-3181.
[6] Li H X.Interpolation mechanism of fuzzy control [J].Science in China,1998,41(3):312-320.
[7] Miao D,Tang Q,Fu W.Fingerprint minutiae extraction based on principal curves [J].Pattern Recognition Letters,2007,28(16):2184-2189.
[8] Rakesh Bajaj,Hooda D S,Singh H.Fuzzy sets and information [M].Saarbrücken:Lambert,2010.
[9] Hata Y,Kobashi S,Hirano S,et al.Automated segmentation of human brain MR images aided by fuzzy information granulation and fuzzy inference [J].Systems Man & Cybernetics Part C Applications & Reviews IEEE Transactions on,2000,30(3):381-395.
[10] Pedrycz W,Vukovich G.Feature analysis through information granulation and fuzzy sets [J].Pattern Recognition,2002,35(4):825-834.
[11] Salehi S,Selamat A.Systematic mapping study on granular computing [J].KnowledgeBased Systems,2015(80):78-97.
[12] Shiau J K,Wei Y C,Lee M Y.Fuzzy controller for a voltageregulated solarpowered MPPT system for hybrid power system applications [J].Energies,2015(08):3292-3312.
[13] Liu F.An efficient centroid typereduction strategy for general type2 fuzzy logic system [J].Information Sciences,2008,178(9):2224-2236.
[14] Liu Z,Li H X.A probabilistic fuzzy logic system for modeling and control [J].Fuzzy Systems IEEE Transactions on,2005,13(6):848-859.
[15] Liu F.An efficient centroid typereduction strategy for general type2 fuzzy logic system [J].Information Sciences,2008,178(9):2224-2236.
(責任编辑:包震宇)